Phương Pháp Thiết Lập TCP Theo Quy Tắc 4 Điểm Trên Robot
Trong bài viết trước, chúng ta đã cùng nhau làm rõ tầm quan trọng của các hệ tọa độ và biết rằng Hệ tọa độ Tool (Công cụ) chính là tâm điểm của mọi chuyển động. Tuy nhiên, khi bạn lắp một súng hàn mới, một đầu cắt plasma hay một xilanh gắp phôi lên cổ tay robot, robot hoàn toàn chưa biết “mũi” của công cụ đó dài bao nhiêu, lệch sang trái hay sang phải như thế nào.
Phương Pháp Thiết Lập TCP Theo Quy Tắc 4 Điểm Trên Robot
Để robot hiểu được vị trí chính xác của đầu công cụ, bạn phải thực hiện một thao tác gọi là Định nghĩa TCP (Tool Center Point). Và phương pháp kinh điển, độ chính xác cao và phổ biến nhất trên mọi hãng robot chính là: Phương Pháp Thiết Lập TCP Theo Quy Tắc 4 Điểm Trên Robot
1. TCP là gì và tại sao phải định nghĩa chính xác?
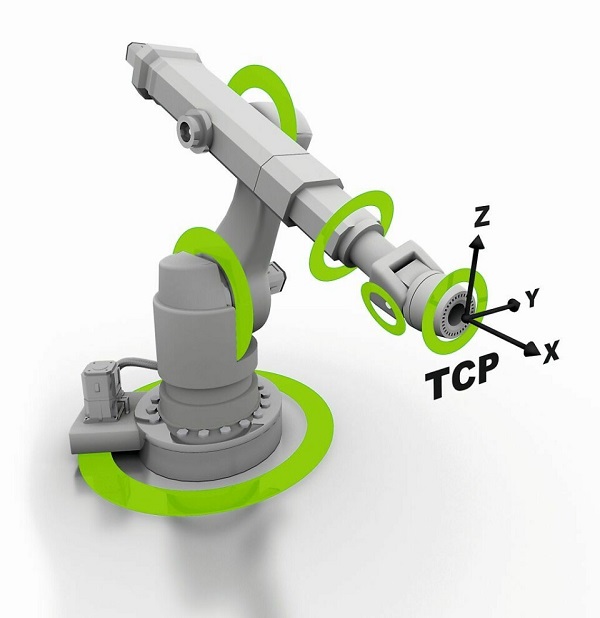
TCP (Tool Center Point – Điểm trung tâm công cụ) là điểm gốc (X=0, Y=0, Z=0) của hệ tọa độ Tool.
Nếu bạn không thiết lập TCP hoặc thiết lập sai:
Khi bạn lập trình lệnh xoay cổ tay robot tại chỗ để đổi góc tiếp cận, đầu công cụ (ví dụ mũi kim phun keo) sẽ bị “văng” ra khỏi vị trí cũ thay vì đứng im tại một điểm.
Robot không thể nội suy chính xác đường thẳng hay đường tròn công nghệ.
Khi TCP được định nghĩa đúng, robot sẽ hiểu được chiều dài vật lý của công cụ. Lúc này, dù cánh tay robot có uốn éo hay xoay lật ở bất kỳ góc độ phức tạp nào, điểm TCP vẫn sẽ đứng im phăng phắc tại một vị trí trong không gian.
2. Nguyên lý hình học của phương pháp 4 điểm
Tại sao lại là 4 điểm mà không phải 1 hay 2 điểm?
Về mặt toán học không gian, để xác định được một điểm cố định duy nhất trong không gian 3 chiều (X, Y, Z), bộ định tuyến của robot cần giải một hệ phương trình ma trận chuyển đổi từ hệ tọa độ khớp (Joint) sang tọa độ Decartes.
Khi bạn cho đầu công cụ chạm vào cùng một cái đỉnh nhọn cố định từ 4 hướng khác nhau (4 góc tiếp cận khác nhau), robot sẽ ghi lại 4 bộ tọa độ góc của các khớp. Từ 4 phương trình này, máy tính nội bộ của robot sẽ tự động tính toán giao điểm duy nhất của 4 đường thẳng hướng tâm. Giao điểm đó chính là vị trí của TCP so với mặt bích (Flange) của robot.
3. Quy trình thực hiện thiết lập TCP 4 điểm thực chiến
Để thực hiện phương pháp này, bạn cần chuẩn bị một Điểm chuẩn (Pointer). Đó có thể là một mũi đinh nhọn, một đầu kim cố định thật chắc chắn trên bàn máy hoặc đồ gá.
Bước 1: Chọn điểm chuẩn và chuẩn bị robot
Gắn công cụ (Tool) lên robot thật chặt.
Đặt điểm chuẩn nhọn ở vùng không gian mà robot dễ dàng tiếp cận từ nhiều phía mà không bị vướng hoặc bị giới hạn hành trình (Limit).
Bước 2: Dạy Điểm thứ 1 (Point 1) — Tiếp cận thẳng đứng
Chuyển robot sang hệ tọa độ Joint hoặc Base để di chuyển.
Khéo léo điều khiển robot đưa mũi của công cụ (ví dụ mũi súng hàn) chạm sát vào đầu nhọn của điểm chuẩn (sai số càng nhỏ càng tốt, hai mũi nhọn chạm vào nhau).
Trên màn hình Teach Pendant, vào mục thiết lập Tool (thường nằm trong mục Setup -> Tool Data hoặc Robot Code tùy hãng), chọn phương pháp 4-Point và lưu điểm này lại thành Point 1.
Bước 3: Dạy Điểm thứ 2 (Point 2) — Nghiêng góc sang bên trái
Nhấc robot lùi ra xa điểm chuẩn một chút.
Xoay cổ tay robot một góc lớn (khoảng từ 20 độ đến 45 độ) hướng sang bên trái hoặc hướng lên trên.
Tiến robot vào lại và cho mũi công cụ chạm chính xác vào đúng cái đỉnh nhọn của điểm chuẩn ban đầu.
Lưu lại thành Point 2.
Bước 4: Dạy Điểm thứ 3 (Point 3) — Nghiêng góc sang bên phải / đối xứng
Tiếp tục rút robot ra. Xoay lật robot sang một hướng hoàn toàn khác (ví dụ nghiêng sang phải hoặc chúi xuống).
Đưa mũi công cụ chạm lại vào đỉnh nhọn của điểm chuẩn.
Lưu lại thành Point 3.
Bước 5: Dạy Điểm thứ 4 (Point 4) — Góc tiếp cận đặc biệt (Thường là lật ngược)
Làm tương tự với một tư thế robot khác biệt nhất có thể so với 3 tư thế trước (ví dụ ngửa súng lên hoặc xoay trục số 6 một góc lớn).
Cho mũi công cụ chạm vào điểm chuẩn lần cuối cùng.
Lưu lại thành Point 4 và nhấn nút Calculate (Tính toán) hoặc Complete.
4. Cách kiểm tra TCP vừa thiết lập đúng hay sai?
Sau khi hoàn thành bước 4, bộ điều khiển robot sẽ hiển thị các giá trị sai số toán học (thường ký hiệu là Error hoặc Standard Deviation). Nếu sai số hiển thị < 0.5mm, việc dạy điểm của bạn đạt yêu cầu. Nếu sai số lên tới vài mm, bạn bắt buộc phải làm lại vì các lần chạm mũi chưa được chuẩn xác.
Mẹo kiểm tra bằng mắt (Check thực tế):
Sau khi lưu TCP thành công (ví dụ đăng ký vào Tool số 1), bạn hãy kích hoạt Tool 1 này lên trên Teach Pendant.
Chuyển chế độ Jog (di chuyển bằng tay) sang hệ tọa độ TOOL.
Thao tác bấm các nút xoay hướng (Rx, Ry, Rz).
Quan sát: Nếu mũi công cụ của bạn gần như đứng im tại chỗ (quay quanh chính nó giống như tâm của một con quay) trong khi toàn bộ cánh tay robot chuyển động uốn lượn, xin chúc mừng: Bạn đã thiết lập TCP thành công xuất sắc!
Lưu ý khi dùng Phương Pháp Thiết Lập TCP Theo Quy Tắc 4 Điểm Trên Robot
Góc nghiêng phải đủ lớn: Giữa 4 điểm dạy, tư thế của robot càng khác nhau (góc nghiêng càng lớn) thì thuật toán tính giao điểm của robot càng chính xác. Nếu bạn chọn 4 tư thế gần gần giống nhau, sai số TCP sẽ rất lớn.
Biến dạng cơ khí: Nếu trong quá trình sản xuất, súng hàn hoặc gripper bị va chạm mạnh dẫn đến biến dạng (bị cong, móp), toàn bộ tọa độ TCP này sẽ bị sai. Lúc này bạn phải hiệu chuẩn (Calibrate) lại TCP 4 điểm này chứ không được dùng bộ dữ liệu cũ.
Hy vọng hướng dẫn chi tiết này sẽ giúp các bạn tự tin cầm Teach Pendant và thiết lập chuẩn xác bất kỳ công cụ nào cho robot
Bạn có thể tham khảo khoá Học Lập Trình Robot Công Nghiệp tại đây:
TRUNG TÂM TỰ ĐỘNG HÓA CÔNG NGHIỆP PLCTECH
Địa chỉ đào tạo
Hà Nội: Số 11 Ngõ 2 Dịch Vọng – Cầu Giấy Xem bản đồ
HCM: 97 Đường Số 3 – Hiệp Bình Phước – TP. Thủ Đức Xem bản đồ
Liên hệ
Điện thoại / Zalo: 0987 635 127 (Hỗ trợ 24/7)
Website: https://plctech.com.vn/
Fanpage: https://www.facebook.com/PLCTechHN

