Các Hệ Toạ Độ Trong Lập Trình Robot
Các Hệ Toạ Độ Trong Lập Trình Robot
Việc hiểu rõ từng hệ tọa độ không chỉ dừng lại ở mức “biết lý thuyết”, mà nó là ranh giới giữa một Kỹ sư lập trình Robot thực chiến và một người chỉ biết vận hành thuần tuý. Dưới đây là 4 hệ tọa độ cốt lõi nhất trong việc sử dụng và lập trình Robot Công Nghiệp.
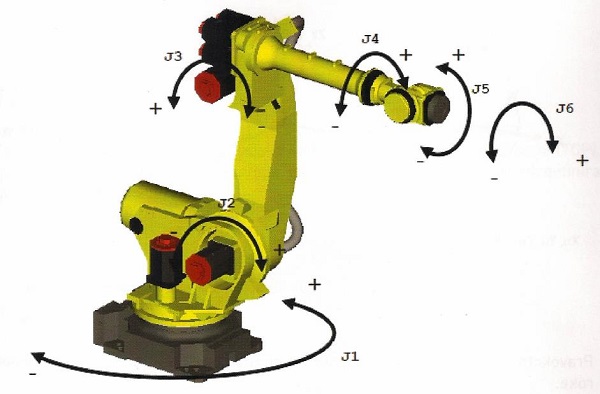
1. Hệ tọa độ các trục (Joint Coordinate System)
Nếu như trong PLC, bạn điều khiển từng driver servo độc lập, thì hệ tọa độ Joint chính là cấp độ điều khiển cơ bản nhất tương tự như vậy.
Bản chất: Hệ tọa độ này không quan tâm đến không gian 3D (X, Y, Z). Nó quản lý robot dựa trên góc quay (độ) của từng trục đơn lẻ (từ Trục 1 đến Trục 6).
Cách thức hoạt động: Khi bạn nhấn nút
+J1hay-J2trên Teach Pendant, chỉ duy nhất motor của trục đó quay, các trục còn lại đứng yên.Ứng dụng thực tế: * Sử dụng khi bạn muốn đưa robot ra khỏi thế Singularity (Điểm chết thuật toán/Điểm kỳ dị).
Dùng để di chuyển robot một cách tự do, đưa robot về vị trí Home (Gốc) ban đầu khi mới mở nguồn.
Lưu ý: Khi chạy ở hệ Joint, quỹ đạo của đầu robot sẽ là đường cong (đường tròn tạo ra bởi cánh tay đòn), tuyệt đối không dùng để chạy đường thẳng công nghệ (như hàn, keo).
Các Hệ Toạ Độ Trong Lập Trình Robot – Hệ Toạ Độ Join
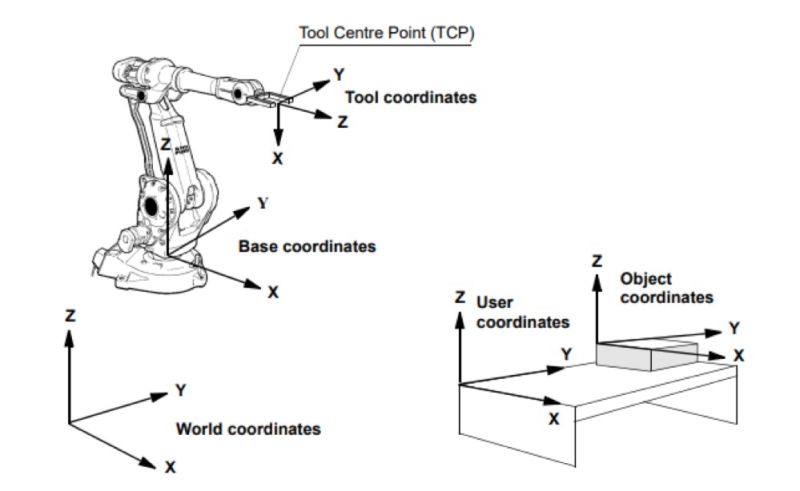
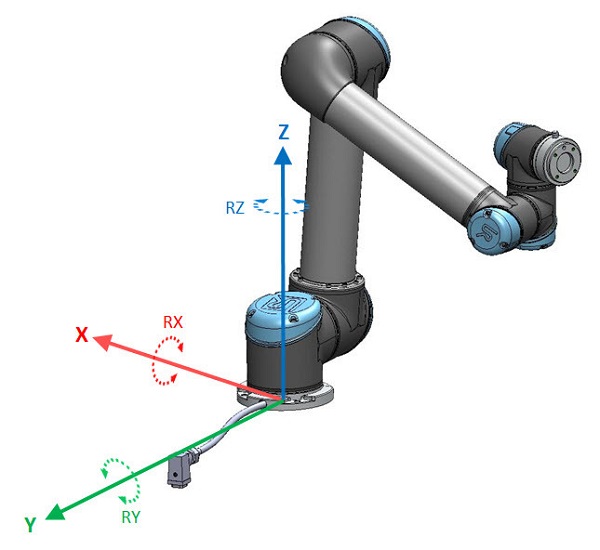
2. Hệ tọa độ Base (Hệ tọa độ gốc)
Khi chuyển sang các hệ tọa độ không gian (Cartesian), robot bắt đầu sử dụng thuật toán động học thuận/nghịch để nội suy 6 trục cùng lúc, giúp điểm trung tâm dịch chuyển theo các đường thẳng tuyến tính hoàn hảo.
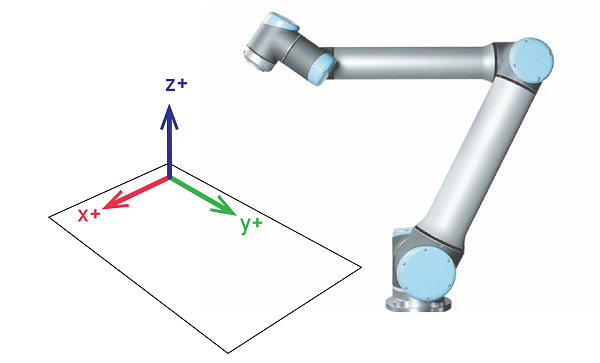
Bản chất: Là hệ tọa độ cố định, lấy gốc (X=0, Y=0, Z=0) nằm ở chính tâm đế của robot.
Quy tắc bàn tay phải:
Trục X: Hướng về phía trước mặt robot.
Trục Y: Hướng sang bên trái của robot.
Trục Z: Hướng thẳng đứng lên trời.
Cách thức hoạt động: Khi bạn Jog trục X+, toàn bộ 6 mô-tơ sẽ tự tính toán để đầu robot tịnh tiến theo một đường thẳng tắp hướng ra xa tâm đế, bất kể robot đang ở tư thế nào.
Ứng dụng thực tế: Thường được dùng làm hệ quy chiếu chuẩn để xác định vị trí của robot trong không gian nhà xưởng hoặc trong một ô máy (Robot Cell).
Các Hệ Toạ Độ Trong Lập Trình Robot – Hệ toạ độ Base
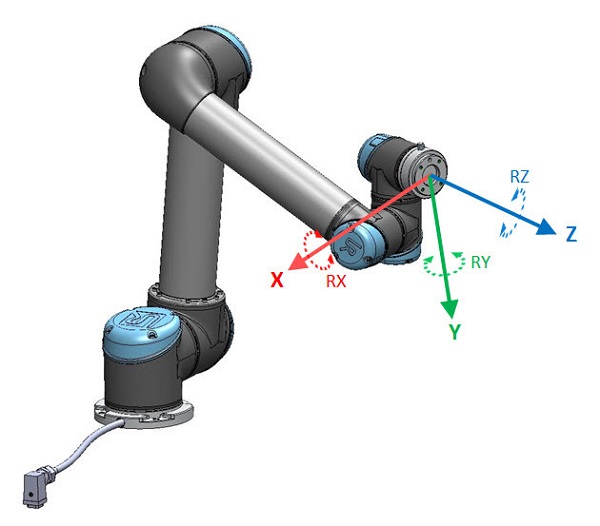
3. Hệ tọa độ Tool (Hệ tọa độ công cụ)
Đây là hệ tọa độ mà các kỹ sư mới vào nghề dễ nhầm lẫn nhất. Robot sinh ra không phải để tự di chuyển cái cổ tay của nó, mà là để đưa công cụ (Súng hàn, Gripper gắp phôi, Dao cắt, Đầu phun keo) đến vị trí làm việc.
Bản chất: Là hệ tọa độ động, gốc tọa độ nằm tại điểm làm việc của công cụ (TCP – Tool Center Point) và nó di chuyển xoay hướng theo sự chuyển động của cổ tay robot.
Sự khác biệt cốt lõi: Nếu ở hệ Base, trục Z luôn hướng lên trời, thì ở hệ Tool, trục Z thường hướng ra từ đầu công cụ. Khi robot lật ngược súng hàn, trục Z của Tool cũng lật ngược theo.
Ứng dụng thực tế: * Cực kỳ quan trọng trong các ứng dụng duy trì góc tiếp xúc công nghệ: Đưa súng hàn đâm thẳng vào phôi (tiến theo Z+ của Tool), hoặc rút kim phun keo lên sau khi đi hết đường (lùi theo Z- của Tool).
Nếu bạn chưa định nghĩa chính xác kích thước công cụ (đăng ký mã Tool cho Robot), khi robot xoay cổ tay, đầu công cụ sẽ bị lệch quỹ đạo ngay lập tức.
Các Hệ Toạ Độ Trong Lập Trình Robot – Hệ toạ độ Tool
4. Hệ tọa độ User / Workobject
Hãy tưởng tượng bạn có một bàn đồ gá đặt phôi nằm nghiêng 30 độ so với mặt đất. Nếu bạn dùng hệ tọa độ Base để lập trình cho robot đi theo mép bàn, bạn sẽ phải tính toán bù trừ tọa độ X, Y, Z cực kỳ phức tạp cho từng điểm. Hệ tọa độ User sinh ra để giải quyết bài toán này.
Bản chất: Là hệ tọa độ do bạn tự định nghĩa bằng cách chọn một điểm trên bàn máy/đồ gá làm gốc tọa độ (X=0, Y=0, Z=0) và áp các trục X, Y chạy dọc theo cạnh của bàn máy đó.
Ưu điểm vượt trội: Khi bạn kích hoạt hệ tọa độ User này, bạn chỉ cần nhấn lệnh
X+, robot sẽ tự động chạy dọc theo mép bàn nghiêng một cách hoàn hảo, việc lập trình trở nên đơn giản như trên một mặt phẳng thẳng đứng.Ứng dụng thực tế (Dành cho kỹ sư thiết kế): Khi di dời máy hoặc khi đồ gá bị lệch vài mm sau thời gian sử dụng, bạn không cần phải dạy lại (re-teach) hàng trăm điểm trong chương trình. Bạn chỉ cần định nghĩa lại duy nhất gốc hệ tọa độ User (3 điểm gốc), toàn bộ các điểm di chuyển của robot sẽ tự động tịnh tiến và xoay theo đồ gá mới.
Các Hệ Toạ Độ Trong Lập Trình Robot – Hệ toạ độ User
Hiểu rõ các hệ tọa độ giúp bạn chuyển từ thế “bị động” (đoán mò xem robot sẽ chạy hướng nào khi bấm nút) sang thế “chủ động” (cho robot phải chạy theo quỹ đạo tối ưu nhất bằng tư duy hình học không gian)
Bạn có thể tham khảo khoá Học Lập Trình Robot Công Nghiệp tại đây:
https://plctech.com.vn/dao-tao-lap-trinh-robot-cong-nghiep-thuc-chien/
TRUNG TÂM TỰ ĐỘNG HÓA CÔNG NGHIỆP PLCTECH
Địa chỉ đào tạo
Hà Nội: Số 11 Ngõ 2 Dịch Vọng – Cầu Giấy Xem bản đồ
HCM: 97 Đường Số 3 – Hiệp Bình Phước – TP. Thủ Đức Xem bản đồ
Liên hệ
Điện thoại / Zalo: 0987 635 127 (Hỗ trợ 24/7)
Website: https://plctech.com.vn/
Fanpage: https://www.facebook.com/PLCTechHN

